
”目标检测 3d“ 的搜索结果

3D目标检测进展综述
标签: 2D目标检测
文中首先对基于深度学习的2D目标检测算法进行概述;其次根据图像、激光雷达、多传感器等不同数据采集方式,...最后总结了3D目标检测的应用意义以及待解决的问题,并对 3D 目标检测的发展方向和新的挑战进行了讨论和展望。


与2D目标检测不同,3D目标检测是使用RGB图像、RGB-D深度图像和激光点云,输出物体类别及在三维空间中的长宽高、旋转角等信息的检测。1简介目标检测是计算机视觉领域的传统任务,与图像识别不同,目标检测不仅需...
展示了使用我们的数据集,一个合理的训练三维目标检测时,可以达到较高的精度基于雷达的算法。
基于YOLO的3D目标检测(激光雷达点云)课程设计


3D目标检测,车辆检测的立体检测,自动驾驶前沿技术。


目标检测YOLO实战应用案例100讲-激光雷达的3D目标检测
目标检测YOLO实战应用案例-基于点云数据的3D目标检测与跟踪
2D目标检测在自动驾驶领域存在很多问题,因为自动驾驶的空间首先是在3D层面上的,而且需要使用RGB图像、RGB-D深度图像和激光点云,输出物体类别及在三维空间中的长宽高、旋转角等信息。这一类检测称为3D目标检测。
本文介绍如何搭建3D目标检测框架,使用docker快速搭建MMDetection3D的开发环境,实现视觉3D目标检测、点云3D目标检测、多模态3D目标检测等等。需要大家提前安装好docker,并且docker版本>= 19.03。
【lidar】3D目标检测PointPillars:论文解读、代码解读、部署实现

3D目标检测跟踪_基于kitti+waymo数据集的自动驾驶场景的3D目标检测+跟踪渲染可视化
本文共4593字,预计需要20分钟,可以先收藏再看哦1 简介目标检测是计算机视觉领域的传统任务,与图像识别不同,目标检测不仅需要识别出图像上存在的物体,给出对应的类别,还需要将该物体的位置通过最小包围框...
基于python的Au实时形状感知的单目3D目标检测系统(ICCV2021).zip 计算机专业,软件工程专业,通信工程大学生课程设计 自己大三的时候写的 适合大家做课程设计,写毕业设计也可以参考 基于python的课程设计
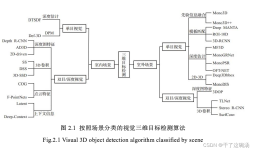
本文综合整理单目3D目标检测的方法模型,包括:基于几何约束的直接回归方法,基于深度信息的方法,基于点云信息的方法。万字长文,慢慢阅读~ 直接回归方法涉及到模型包括:MonoCon、MonoDLE、MonoFlex、CUPNet、...


论文Objects as Points ...1、2D目标检测 通过预测目标的中心点keypoint、由于下采样带来的中心点的偏移offset及尺寸size来获取目标的bounding box。 keypoint: 输出二值heatmap,$ \hat{Y}\in [0,1]^{\...
MonoDLE作为一个延续CenterNet框架的单目3d检测器,在不依赖dcn的情况下获得了较好的性能,可以作为baseline。论文核心观点,主要包括为三点: 2d box中心点与投影下来的3d box中心点,存在不可忽视的差异,优先使用...


推荐文章
- Unity3D 导入资源_unity怎么导入压缩包-程序员宅基地
- jqgrid 服务器端验证,javascript – jqgrid服务器端错误消息/验证处理-程序员宅基地
- 白山头讲PV: 用calibre进行layout之间的比对-程序员宅基地
- java exit方法_Java:如何测试调用System.exit()的方法?-程序员宅基地
- 如何在金山云上部署高可用Oracle数据库服务_rman target sys/holyp#ssw0rd2024@gdcamspri auxilia-程序员宅基地
- Spring整合Activemq-程序员宅基地
- 语义分割入门的总结-程序员宅基地
- SpringBoot实践(三十五):JVM信息分析_怎样查看springboot项目的jvm状态-程序员宅基地
- 基于springboot+vue的戒毒所人员管理系统 毕业设计-附源码251514_戒毒所管理系统-程序员宅基地
- 【LeetCode】面试题57 - II. 和为s的连续正数序列_leet code 和为s的正数序列 java-程序员宅基地